ICT & IoT Applications
Interoperability platforms and Edge systems for the IoT
Scientific Coordinator: Prof. Tullio Salmon Cinotti, Prof. Luca Roffia, Prof.ssa Eleonora Franchi Scarselli.
This research is mainly funded by EU and addresses two vectors in IoT research: Interoperability platforms and edge systems.
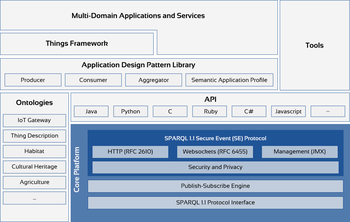
At platform level the research is focused on the design and implementation of a software architecture to support the development of distributed, dynamic, context aware and interoperable services and applications. The architecture named SEPA (SPARQL Event Processing Architecture), enables the detection and notification of changes over the Web of Data by means of a content-based publish-subscribe mechanism where the W3C SPARQL 1.1 Update and SPARQL 1.1 Query languages are fully supported and used respectively by publishers and subscribers. The architecture is built on top of the W3C SPARQL 1.1 Protocol and introduces the SPARQL 1.1 Secure Event protocol and the SPARQL 1.1 Subscribe language as means for conveying and expressing subscription requests and notifications.
At edge level the focus is on the design of ultra-low power, reconfigurable, unattended wireless hubs for heterogeneous sensors to be deployed in smart agriculture, and other monitoring applications.
Related Projects: Arrowhead Tools, CONNECT, SWAMP
ARCES WoT group webpage.
Mathematical Foundations of Topological Data Analysis
Scientific Coordinators: Prof. Massimo Ferri, Prof. Patrizio Frosini, Prof.ssa Claudia Landi (Università di Modena e Reggio Emilia)
Many areas of science require analysis of large, high-dimensional, and incomplete or noisy datasets. By combining algebraic topology and geometry, Topological Data Analysis (TDA) provides various tools, preeminently persistent homology, to describe the shape of this kind of data. The main advantages of TDA over other more classical techniques are: coordinate and scale freeness, dimensionality reduction, robustness to noise, inferentiality with guarantees.
In the last decades, TDA has been applied to many types of data input from different fields and has proven to be successful in practice. TDA has also an important role in machine learning, as a tool for the topological and geometrical modeling of deep learning.
The main challenges that TDA needs to face in the next years are: to improve its efficiency, to increase its discriminative power, to extend its fields of application. To these ends, the main activities that are carried out at ARCES concern:
- Extending the tools of persistence beyond the topological domain,
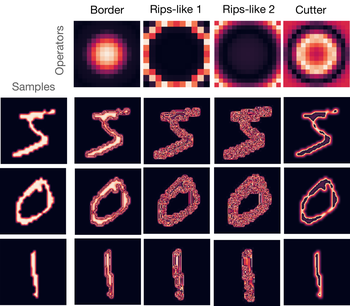
- Studying the topological and geometrical properties of spaces of group equivariant non-expansive operators via TDA,
- Lifting persistence from homology to homotopy.
Rakeness-based Compressed Sensing
Scientific Coordinator: Prof. Riccardo Rovatti
Compressed Sensing (CS) is a signal processing technique that allows the acquisition of signals by means of a limited number of linear measurements that is potentially much smaller than the number of Nyquist-rate samples. In standard CS, the possibility of such sub-Nyquist representation hinges only on the assumption that the class of signals to acquire is sparse. If this happens the actual number of degrees of freedom that have to be fixed to identify the input waveforms is smaller than their extrinsic dimensionality as expressed by bandwidth, and their information content can be represented by a measurements vector with less digital words than the minimum amount of Nyquist-rate samples.
The general CS theory does not depend on the specific class of signals to acquire, and claims of universality are quite frequent in the Literature. Yet, from a purely engineering perspective, whenever degrees of freedom and a priori knowledge on the application are simultaneously present, the obvious way to go is to use all available knobs to optimize the system.
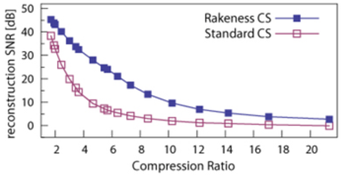
Starting from this consideration, we propose an efficient way to adjust the statistical distribution of the sensing process in order to optimize the acquisition performance depending on the actual statistics of the acquired signal. This is what the rakeness approach does, yielding a new policy for the design of acquisition stages that improves of the performance of classical CS either by reducing the minimum amount of measurement needed for a correct reconstruction or by improving reconstruction quality for a fixed signal compression.
The aims of this research project are in testing the effectiveness of the proposed approach at different levels, from pure mathematical analyses to a physical realization of devices supporting the rakeness approach.
Further information on research group website.
Related Projects: CONNECT, CONVERGENCE, ADAS+, PROGRESSUS.
DTN (Delay-/Disruption-Tolerant Networking)
Scientific Coordinator: Prof. Carlo Caini
The origin of the DTN concept lies in a generalisation of requirements identified for Inter-Planetary Networking (IPN), when IPN researchers realized that the same approach had benefits when applied to all “challenged networks” on Earth (wireless sensor networks, tactical communications, disaster recovery, mobile devices, etc.) as well as in deep-space. To overcome the challenges of these networks (mainly long propagation delay, disruption, network partitioning, etc.), which prevent the use of TCP/IP architecture, DTN considers the introduction of an overlay protocol, called Bundle Protocol (BP) generally on top of transport protocols (TCP, UDP…), with long-term information storage capabilities on intermediate nodes.
This research activity - developed in collaborations with NASA-JPL, ESA and DLR (German Space Agency), covers multiple aspects of DTN, such as performance evaluation in satellite and deep space environments, transport protocol enhancements, security, routing and possible terrestrial application to Internet of Things.
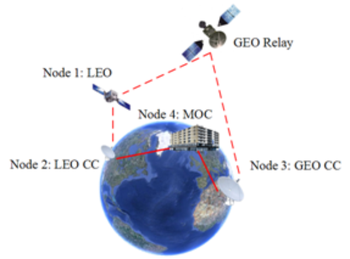
Among the most recent activities, it is worth mentioning the participation of ARCES to the Earth Observation DTN (EO-DTN) project, supported by ESA.
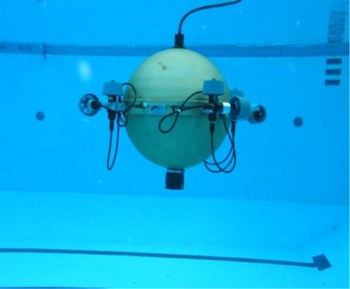
Fault Detection and Isolation for Autonomous Underwater Vehicles
Scientific coordinator: Prof. Paolo Castaldi
The increasing autonomous requirements in the field of Unmanned Underwater Vehicle (AUV) implies a consequent development of a supervision scheme for early actuator Fault Detection and Isolation (FDI) to overcome problems such as reliability, availability and operating safety, while maintaining desirable performances.
This project addresses a model-based Fault Detection and Isolation (FDI) problem for the actuators of the SUSHI Autonomous Underwater Vehicle (AUV). A new AUV FDI system, based on the NonLinear Geometric Approach (NLGA), resulting in a dedicated bank of scalar filters allowing simultaneous actuators FDI, is investigated in the framework of a formal collaboration with the CNR-IMM of Genova. The structural conditions for actuator fault diagnosability are analytically demonstrated and even a sea current decoupled FDI, improving the robustness with respect to hydrodynamic disturbances, is obtained. The results tested by means of high-fidelity simulations and real case experiment demonstrate the effectiveness and the reliability of the proposed methodology.
Main activities:
- Modeling of dynamical behaviour of the AUV (Fossen model plus sea current model)
- Design of the FDI system
- Simulations and testing in the framework of the project SUSHI and the CNR/ARCES collaboration
These research actitivities are carried out within the cooperation between ARCES and CNR - INM (Institute of Marine Engineering)
Related Project: SUSHI DROP (Interreg Italy - Croatia)
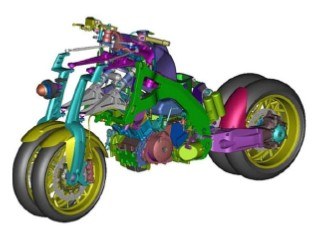
Automatic Control Systems for Multi-wheel Motorcycle Stability
Scientific Coordinator: Prof. Matteo Zanzi
Urban mobility needs open emerging scenarios where new applications merge with innovative technological solutions and environment care. In this context, a class of vehicles whose number promises high growth rate in the next future is that of the three/four wheels scooters.
These vehicles pose new technological challenges such as problems related to vehicle tilting control and attitude stabilization. In particular, an important issue raised by this appication is the availability of an accurate and safe automatic tilting system made of active suspensions that work both during vehicle cruise, straight and at turns, and low speed situations (even stationary such as traffic lights stop, parking).
The research activity related to this project is focused on the development of efficient tilting control algorithms that are robust and reliable for a safe use in urban mobility and compensate for different dynamic solicitations and stress of the vehicle body by exploitation of adaptive and fail-safe control schemes.
Main activities:
- Modeling of dynamical behaviour of mechanical dampering in motorcycle
- Design of active suspension reliable control
- Simulations and testing of integration of active suspension system and motor vehicles
Related Projects: QATS COntrol